1 Ground control system
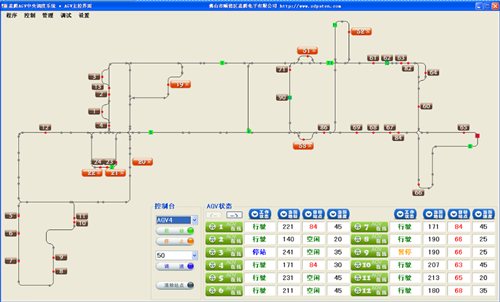
The AGV ground control system (Stationary System) is the AGV upper control system and is the core of the AGV system. Its main function is to perform task assignment, vehicle management, traffic management, communication management, etc. for multiple AGV single machines in the AGV system (AGVS).
- Task management
Task management is similar to the process management of a computer operating system, which provides an interpreted execution environment for the AGV ground control program; provides scheduled operations based on task priorities and startup times; provides various operations on tasks such as start, stop, cancel, and the like.
3 Vehicle Management
Vehicle management is the core module of AGV management. It assigns scheduled AGV execution tasks according to the request of material handling tasks. According to the principle of AGV walking time, the shortest walking path of AGV is calculated, and the walking process of AGV is controlled, and loading and unloading is timely released. Charging command.
4 traffic management
According to the physical size, operating state and path condition of the AGV, the AGV provides automatic avoidance measures for each other, and avoids the deadlock method of the vehicles waiting for each other and the method of releasing the deadlock; the traffic management of the AGV mainly includes the walking segment allocation and deadlock. Reporting function.
5 communication management
Communication management provides communication functions between AGV ground control system and AGV stand-alone, ground monitoring system, ground IO equipment, vehicle simulation system and host computer. The communication between the AGV and the AGV uses radio communication, and a wireless network needs to be established. The AGV only communicates with the ground system in two-way communication, and the AGV does not communicate with each other. The ground control system uses polling mode and multiple AGV communications; and the ground monitoring system and vehicle The communication between the simulation system and the host computer uses TCP/IP communication.
6 vehicle drive
The trolley drive is responsible for the collection of the AGV status, and issues a permission request for the travel segment to the traffic management, and sends the AGV to the confirmation segment.



