Each stage needs to constantly update and improve the new content of the product according to the changing market conditions. The era of rapid development will undoubtedly eliminate a large number of enterprises.
Mr. Yang Jianping, Director of Robotic Products at Danbach, Jiangxi Province, at the Chappe Awards, expounded the theme of smart factories from three aspects of AGV navigation technology, application of AGV navigation technology, and development of AGV navigation technology. You need to understand the history of AGV to understand the history in order to better look into the future.
Jiangxi Danbach Robotics Co., Ltd. (DBH) is a professional robot manufacturer, complete plant planning information provider, intelligent storage system integrator and intelligent factory system integrator. It provides independent research and development of intelligent manufacturing integration industry solution platform and intelligent factory. Products, such as systems, intelligent logistics systems, intelligent manufacturing laboratory systems, and industrial IoT platforms.

Historically, some people think that Ford Motor Company first used AGV technology in 1913, and considered it the beginning of AGV. But he pointed out that the actual application should be in 1950, also a tractor used by Americans, transforming the tractor into an AGV. The Japanese really started to introduce them in the 1980s, and we Chinese also cited them after seeing them. It should be in 1989.
The development of China's AGV was introduced in 1989 and began to be explored in 1990. The real starting point was in the period 1991 to 2000. After 2000, the AGV technology developed slowly. The actual explosion should be in 2012. Because of the development of network technology and computer technology in recent years, AGV technology has also shown a vigorous development trend.
He pointed out that AGV navigation technology is an evolution of AGV. Without navigation technology, AGV is difficult to move. In the early AGV technology, electromagnetic emission was used. It took decades of technology, and later there was magnetic stripe technology. Now it has inertia, Geography, laser, vision, wireless and other technologies. Electromagnetic guidance is to dig a hole in the ground, bury a section of wire, and generate some signals (sine waves) on the wire. There is a device on the car to capture the signal to guide the car to walk. This is an early technology.
"This technology is no longer appropriate. After all, it is necessary to dig a pit, and it is particularly troublesome to change the accuracy. After the magnetic stripe guidance is laid on the ground, the path can be changed when necessary. Two-dimensional code guidance, posted a lot on the ground Bar code, and laser guidance, is installed on the roof of the AGV by a lidar. Laser guidance is divided into reflective plates and no reflective plates, which are generally used indoors. "Yang Jianping said.
Therefore, the application of AGV should be comprehensive. According to the history and market, continuous innovative development and the provision of overall innovative solutions can continuously serve the market and customers. Times are changing, and companies need to continue to develop and produce products based on the market in order to be able to follow the wave of the times and grasp cutting-edge technologies and markets.
Dai Rongrong, the project manager of the Village Comprehensive Research Institute, also said recently that it has verified the importance of constantly updating products proposed by Mr. Yang Jianping. Since Japan introduced the first robot from the United States in 1967, Japan's robotics technology has roughly gone through five stages before it has gradually formed its current perfect system.
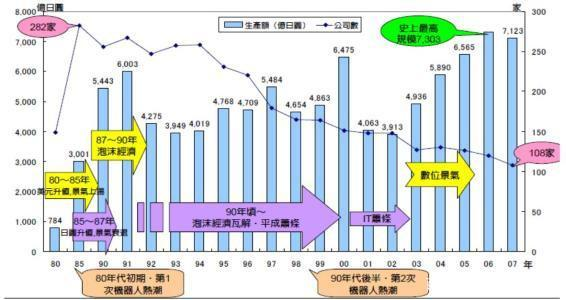
The first stage-the early 1980s. Japan developed arc welding robots and formulated safety standards for the robot industry.
The second stage-the mid-1980s. In response to market demand, Japan has carried out a large number of calculations and developments in the control system of robots, and has strengthened the standardization of arc welding functions through human-machine dialogue.
The third stage-the late 1980s. Based on the application requirements derived from sensors, the Japanese robot industry has strengthened the applicability between control systems and various types of robots.
The fourth stage-the mid-1990s. Through extensive market modularization requirements and continuous improvement of the control system, Japan has embedded Robot language and configuration menus into the robot system to strengthen the dialogue function.
The fifth stage-the late 1990s. At this time, the Japanese robot industry began to emphasize the mutual coordination and independent operation of robots, and realized the complexity and efficiency of industrial robot operations through multi-axis control.
The gradual expansion of the market system in technological updates has undoubtedly made Japanese companies occupy a considerable market position in the global market. China and Japan are not far away from each other, and being able to keep up with the market's continuous innovation will undoubtedly make enterprises more market-oriented.



