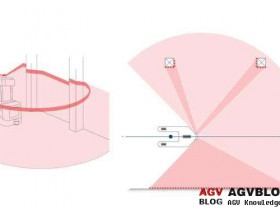
The AGV path refers to the planned driving route for the AGV. The system path design is usually associated with the AGV system flow design. The most intuitive feeling for the AGV system is the path of the AGV, especially for wired guidance (electromagnetic guidance, For tape guidance, optical guidance, etc. for AGV.
Foreign scientists have made a summary of the problems that mobile robots need to solve: Where am I (Navigation)? Where do I go (task management, vehicle allocation)? How do I get there (Guide to Guidance or Tracking Tracking)? These problems are first reflected in the path design of the AGV system. The path design is not only to show the driving route of the AGV, but more importantly, to obtain the information necessary for the AGV ground control system and the AGV stand-alone operation: workstation station (loading and unloading) Information, traffic management information; and coordinate information, speed information, distance information, etc. that support AGV stand-alone walking, therefore, path design is one of the most critical aspects of AGV system design.
The path is not simply designed according to the system's process. At the same time, it must be combined with the actual application of the whole project, taking into account the actual number of single machines in the AGV system, guiding mode, driving mode, transfer mode, vehicle size, Walking indicators, load capacity and site conditions.
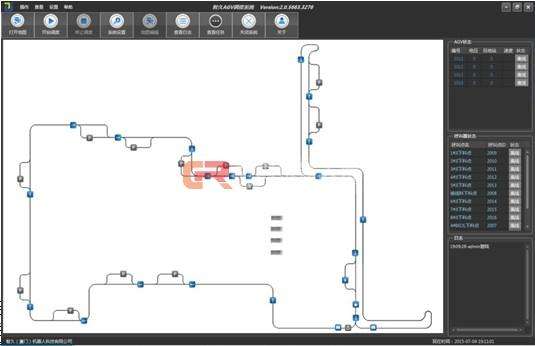
Path planning is the basis of the system. The design of the path will directly affect the efficiency of the system. Therefore, the driving path of the AGV must be as smooth as possible.
Taking the buried electromagnetic guidance AGV system as an example, the design of the path should satisfy the principle of diversification. Of course, the path diversity referred to here is relative and comprehensive. The biggest characteristic of electromagnetic guidance AGV is that AGV always travels along the guide line, and the design of the path should be adapted to local conditions and flexible. Multiple AGVs can be flexibly scheduled in complex systems, and rapid response is the goal pursued by the AGV engineering project. For this reason, in the design process of the path, the scheduling characteristics of the AGV should be considered in detail, and as far as the actual conditions permit, the driving loop should be provided as much as possible, so that the AGV has more choices on the walking route. In this way, although the guiding path will become complicated, the difficulty and workload of the construction will increase, but due to the diversification of the path, the effective operation rate and work efficiency of the AGV system operation will be improved. In the sense that the number of AGVs may be reduced by this, it seems that the increase in workload due to slotted wiring is negligible.