The existing AGV obstacle avoidance equipment adopts photoelectric circuit or ultrasonic wave, and can only realize whether there is an obstacle in front of a short distance and a small range, and then performs a parking treatment method. For the slow speed situation, the obstacle avoidance scheme can be Meet the needs. However, with the continuous development of technology, the speed of the AGV car is constantly increasing. Since the transported AGV car has a relatively large inertia, when it detects an obstacle in front, it stops directly, and may hit an object in front. And because the path of the AGV trolley is generally not long, it will have a large negative impact on the execution efficiency and time of the trolley.
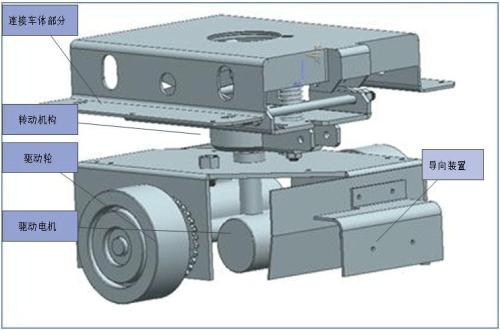
1. Intelligent obstacle avoidance AGV trolley system, which is characterized in that it comprises an AGV trolley, a Hall electromagnetic sensor, a laser scanning radar, a laser scanning global positioning sensor, a Bluetooth module and a host computer; the Hall electromagnetic sensor is arranged in an AGV trolley car The front side of the front side of the body, the laser scanning radar and the laser scanning global positioning sensor are arranged on the upper part of the AGV car body, and the MCU main control module of the AGV car communicates through the Bluetooth module host computer.
2 . The intelligent obstacle avoidance AGV trolley system according to claim 1 , wherein the intelligent obstacle avoidance AGV trolley system further comprises a warning light module and an audible alarm module, the warning light module and the sound alarm module. Communicate with the host computer through the Bluetooth module.
3. The obstacle avoidance method of the intelligent obstacle avoidance AGV trolley system is characterized in that it comprises the following steps:
1) Receive the setting information of the host computer, set the destination, speed and safety distance of the AGV trolley, and clear the travel distance and time;
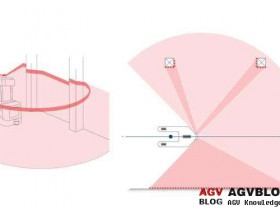
2) Positioning the AGV car through the laser scanning global positioning sensor system, automatically navigating through the Hall electromagnetic sensor, and scanning the surrounding objects in real time by laser scanning radar, and transmitting the scanning result to the upper computer;
3) When the scan finds that an object will enter the safe area of the car, judge the moving speed of the scanned object, and perform obstacle avoidance according to the result of the judgment; if the moving speed of the object is greater than the upper limit of setting, the upper machine controls the AGV car to report the wrong sound. Flute and stop until the object leaves the safe area. If the moving speed of the object is less than or equal to the upper limit, the speed of the AGV car is adjusted so that the object or the car arrives at the intersection equal to the set distance and then bypass the object; When the stationary obstacle blocks the driving route of the trolley, and there is no other obstacle in the bypass range, the trolley enters the bypass mode. At this time, the control system of the upper computer records the direction of the trolley deviating from the track when leaving the magnetic track. When the sensor detects the magnetic track again, it enters the normal mode. When bypassing, the radar is scanned by the laser so that the object is always outside the safe distance of the car.