The AGV trolley control system design and motion control mainly have the following common sense: path identification, traffic control, destination identification, obstacle recognition, transportation control and safety system. Generally, the economical magnetic navigation AGV trolley adopts the upper computer control queuing method to determine the order of the AGV, and the basic concept including the transportation control of the flow call operation.
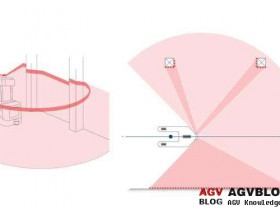
The AGV trolley is an unmanned indoor transport tool that is commonly used in the production and assembly fields in the warehouse. Its form is roughly divided into two categories: one is free walking and automatic bypass AGV car and the other is the most commonly used path limiting AGV car. Most of the first type of AGV cars use the dead reckoning algorithm. The most common one is to perform three-side calculation on the reflected light by the mounted reflector to determine its exact position. Of course, the team also carries out wireless signals such as RF, WIFI, UWB and so on. Triangulation positioning. At the same time, vacuum cleaner robots have recently adopted visual ceiling positioning, but they cannot achieve precise positioning. The second type of AGV trolleys are limited to a fixed network path, the most common of which is an electromagnetic (underground buried wire) magnetic strip or ribbon that guides the positioning by marking the track on the floor.
The AGV trolley control system has four common forms: the AGV trolley control system with relatively simple functions is mostly controlled by a single-chip microcomputer or by a PLC; in some AGV cars with complex functions for motion control accuracy and scalability, special motion is adopted. Control card (core board) or industrial computer to achieve high-speed computing. The power supply is mainly powered by batteries or supercapacitors, the most common being battery-powered, including the cheapest but bulky lead-acid batteries, as well as light-weight and small-sized lithium-ion batteries, in some high-explosion-proof locations or high-current applications. A lithium-ion battery is required. The charging form is divided into three types: offline charging, automatic charging station charging, and non-contact charging. For safety reasons, we usually do not recommend using automatic charging station charging, which is as dangerous as a time bomb because of the cheap automatic device. Similar to the fact that the device such as the shrapnel contact is unattended due to poor contact and the high temperature of the cable (these selling techniques are basically flickering, it is difficult for the battery protection device to be triggered under such circumstances) is very dangerous. .
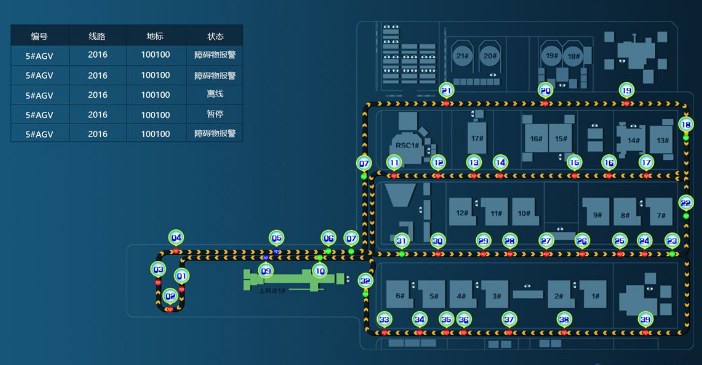
Finally, the AGV trolley needs to prevent collisions. At the same time, it branches into separate areas at the same time. Each area only allows one AGV, or it can be realized by the sensor to the upper computer system. This is the AGV central control system that we often say. Of course, we There are also more economical practices. Speaking of here, our powerful state-owned enterprises have adopted NDC control system technology (Danaher motion) in the core control of AGV through decades of efforts, and they have become the country's great tools.