At present, the common AGV navigation methods mainly include the following, which have different applicable scenarios and characteristics:
Magnetic stripe navigation agv

Lay a magnetic strip on the road, and realize the navigation of the AGV through the continuous induction of magnetic signals by the magnetic navigation sensor.
The advantages are that the technology is mature and reliable, the cost is low, and the laying and implementation are relatively simple. The disadvantage is that it needs to be constructed in advance; the magnetic strip is easily damaged and polluted and requires regular maintenance; and the AGV driving route cannot be easily adjusted and the flexibility is poor.
Magnetic nail navigation AGV
It also uses magnetic navigation sensors to induce magnetic signals for navigation. The difference is that the previous magnetic stripe continuous induction is replaced by magnetic nail interval induction, and the AGV travel path is determined by the magnetic nail connection.
The advantages are that the technology is mature and reliable, and the cost is low; the concealment is better and it is not easy to be damaged. The disadvantage is that it needs to be excavated and embedded in advance, and the construction cost is high; the flexibility is poor, and the later change cost is high; the magnetic nail interval area is unstable, and it is not suitable for the human-machine communicative environment; and in the heavy load scenario, the magnetic nail is easily damaged. Difficult to replace.
QR code navigation AGV

The navigation method of magnetic nails is replaced by a QR code. The typical application is the Amazon kiva robot, which realizes the "goods to people" picking mode.
The advantages are that the AGV runs accurately, the laying cost is low, and the path adjustment is relatively convenient; the disadvantage is that the QR code is easy to be stained and requires regular maintenance; the application flexibility is low, and it cannot adapt to the human-machine inclusive environment; at the same time, the operating environment (such as dust-free Room) and objective conditions such as ground flatness have certain requirements.
Laser reflector navigation AGV
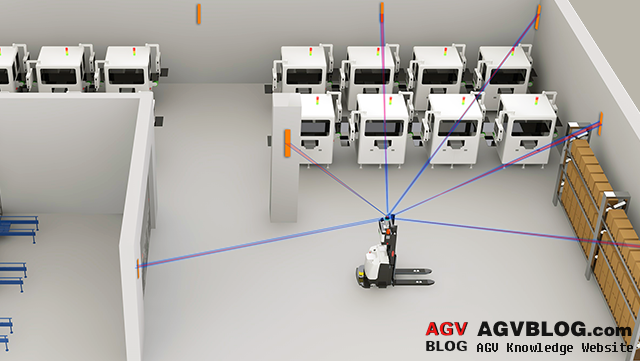
Install a precise laser reflector around the AGV’s travel path. The AGV emits a laser beam through a laser scanner and collects the laser beam reflected by the reflector at the same time to determine its current position and heading. Realize the guidance of AGV.
The advantage is that no construction is required on the ground, and the AGV driving route is flexible. The disadvantage is that the reflector needs to be laid in advance in accordance with certain requirements, and the cost is relatively high; it is suitable for the working environment without obstruction.
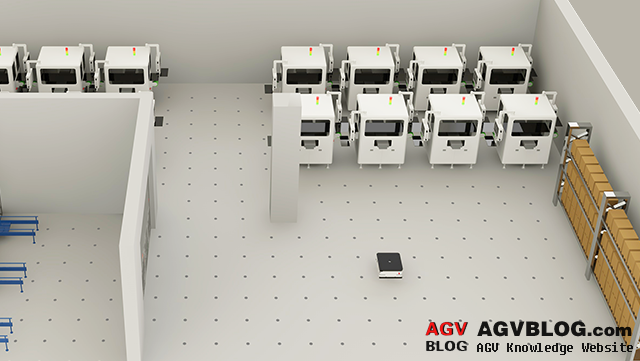
Laser SLAM navigation AGV
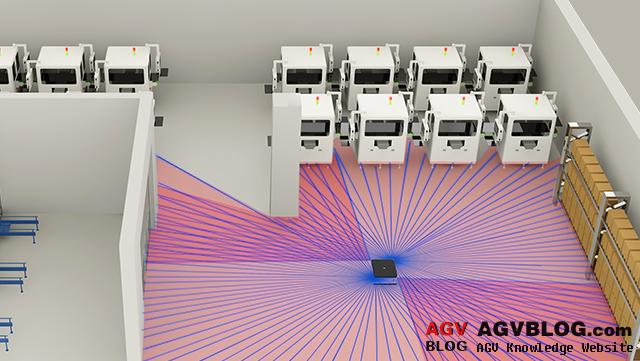
There is no need for auxiliary navigation signs such as QR codes and reflectors. Instead, the natural environment of the work scene (such as pillars, walls, etc.) is used as a reference to realize positioning and navigation.
The advantage is that it does not require hardware construction, and the deployment cost is low; and it can realize flexible obstacle avoidance and man-machine integration operations; the AGV driving path is flexible and changeable, and can be dynamically edited through software to meet the needs of flexible production; but in application There are also some disadvantages. For example, when working in high dynamic or similar transparent, mirror-like environments, it is easy to lose positioning.
Higher reliability, stronger adaptability, better precision
Jiazhi laser navigation integrates the advantages of various navigation technologies. During operation, it can switch the navigation mode automatically according to the needs at any time, and automatically shuttle between different production environments and processes to achieve the user's millimeter-level high-precision positioning requirements while greatly improving Operating range and stability of AGV.
Support larger size maps
Jiazhi Laser Navigation AGV adopts distributed map storage method, which breaks through the limitation of traditional navigation technology on adaptable map size, and efficiently realizes the effective storage, management and sharing of environmental maps of the factory area. With the support of this technology, Jiazhi AGV can easily realize the man-machine inclusive operation in a factory area of more than 40,000 square meters on a single map, and has ultra-high adaptability, stability and robustness.
More suitable for manual operation
With the support of Jiazhi’s self-developed algorithm, Jiazhi AGV can automatically identify the exact position of production equipment such as shelves and docks for docking in actual operations, avoiding various losses caused by manual operation errors and stabilizing the AGV system The operating efficiency of the system has greatly improved production efficiency.
Performance characteristics and advantages of AGV
At present, Jiazhi’s laser trackless navigation AGV has mature application cases in many industries, including electronic information, automobiles and auto parts, electric power sets, medicine, new energy, textiles and clothing, etc., helping enterprises to lean production management, improve operational efficiency, and truly Realize a smart factory.



