 AGV, KIVA, AMR, unmanned forklift... In today's robot market, these words should be familiar to you. When faced with automation transformation, many business owners are puzzled, what is the difference between these mobile robots? Which one is best for our scenario? Don't worry, we will use a short article today to take you into the world of mobile robots.
AGV, KIVA, AMR, unmanned forklift... In today's robot market, these words should be familiar to you. When faced with automation transformation, many business owners are puzzled, what is the difference between these mobile robots? Which one is best for our scenario? Don't worry, we will use a short article today to take you into the world of mobile robots.
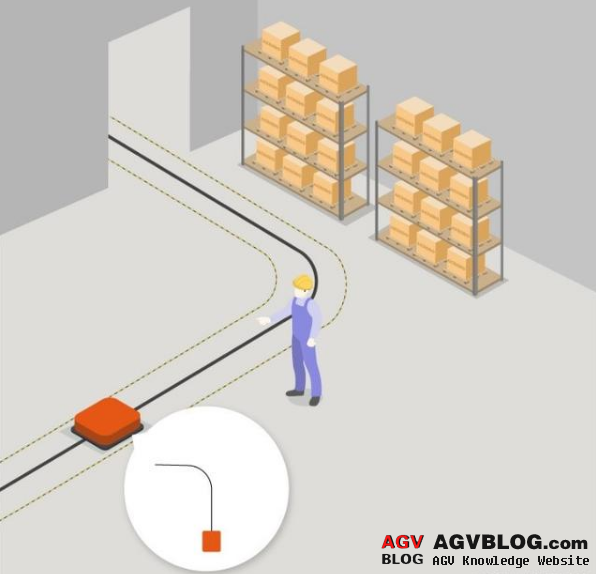
(Solid line) Guide AGV

AGV (Automated Guided Vehicle) is a very historical term. The earliest AGV actually refers to (solid line) guided AGV. Obviously, the (solid line) guided AGV is based on the fixed guide wires (wires, ribbons, magnetic strips, etc.) laid on the ground. It has simple safety protection sensors and various transfer vehicles. The transportation method is more Traditionally, similar to the subway, it runs on a single path and stops at a fixed station. (Solid line) The application of guided AGV has a history of nearly 70 years. There are many application scenarios in the manufacturing industry, and there are also some limitations.
Because it runs according to the prescribed path, the (solid line) guided AGV usually only runs on the specific “track” that has been demarcated, and only has simple obstacle perception capabilities. It cannot bypass the obstacle and can only wait until the obstacle is cleared. (Solid line) Guiding AGV is difficult to handle complex and tedious task instructions and lacks human-machine coordination.
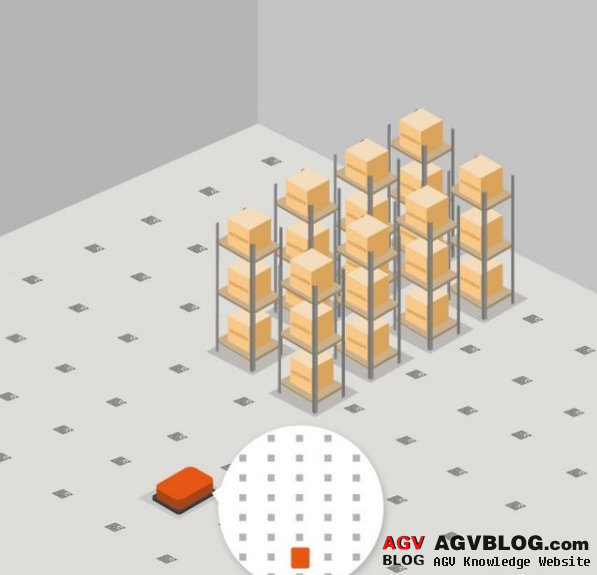
Landmark AGV, also known as KIVA robot, is widely used by Amazon in goods-to-person warehouse picking scenes. Lay landmarks (such as QR codes, etc.) on the ground, and move between the landmark matrixes through the QR code positioning.
Based on discrete landmarks for positioning and navigation, landmark AGVs are more flexible in route selection, and have good multi-machine collaboration capabilities. The technological upgrades allow landmark AGVs to have two main scenarios where they can show their skills: ①Goods in e-commerce warehouse The high-frequency picking scene; ②The parcel sorting scene of the express distribution center. Of course, it can also be seen in the logistics system of some production lines, but to deploy this type of robot, it is also necessary to lay fixed path beacons and set up a specific operating area, and this type of robot usually only has simple perception capabilities and cannot be used in Man-machine collaboration operation scene.

Most unmanned forklifts are soft-guided AGVs. Compared with (solid line) guided AGVs, the soft-guided technology has higher accuracy and wider range of positioning technology, which can plan routes at the software level to achieve physical ground Replace the effect of the physical guide wire. Moreover, soft-guided AGVs generally have more sensors to ensure safety during operation. The early soft guidance technology is mainly laser positioning technology with reflectors. Generally, reflectors are installed on the wall with a height of about 2m, and the reflectors with coordinate information are measured by the positioning lidar on the robot to perform high-precision positioning of the robot. Then a virtual guide wire is generated at the software level, and the robot can move along the virtual guide wire. Nowadays, there are more abundant positioning technologies to replace the reflector laser positioning technology.
Although unmanned forklifts do not need to lay fixed beacons on the ground, they drive along virtual guide lines and do not have the ability to flexibly avoid obstacles and adapt to the real environment. They usually only travel on wide arterial roads. From a safety perspective, stopping and waiting is still the main obstacle avoidance method.

AMR (Autonomous Mobile Robot) refers to a mobile robot with strong autonomy, and is currently the only mobile robot defined in the scene of human-machine collaboration. Generally, it needs to have rich environment perception ability, dynamic path planning ability based on site, flexible obstacle avoidance ability, global positioning ability, etc.
Different from traditional AGV, AMR must integrate multiple sensors (lidar, depth camera module, ultrasound, etc.), and have depth perception capabilities to ensure safe and flexible operation in the scene of human-machine collaboration, just like a driverless car . AMR usually scans the application scenario first, and then builds a map in the "brain" of AMR, and then locates and navigates based on the environmental map, perceives various dynamic and complex obstacles around it during driving, and actively based on the real scene Plan the route and actively avoid various obstacles to ensure safe and efficient arrival at the designated target location.
After understanding the difference between different mobile robots, you may still ask, what kind of robot is suitable for my scene? Next, is the moment to reveal the most important content of this article:
Long-term fixed transportation path can choose solid line guide AGV
If it is a point-to-point transportation scenario in a factory, the business logic is fixed, there is no need to adjust for a long time, the process is simple, and the working area is small, then the (solid line) guided AGV has a price advantage, and the (solid line) guided AGV can be solved. Problems and cost savings.
Optional landmark AGV for high-frequency intensive picking scenes
If it is a high-frequency intensive picking scene in a warehouse, small and medium-sized items with high daily orders per unit area, the "shelf-to-person" operation mode can improve efficiency, and landmark AGV is preferred.
Soft guided AGV is optional for small-person transportation scenarios
If it is a factory or warehouse, the main road transportation pallet point-to-point transportation scene, the main road is wide, the safety requirements are not high, and the transportation distance is long, then the unmanned forklift with soft guidance technology is suitable.
Choose AMR for human-machine mixed traffic scenarios
If none of the above-mentioned AGVs are suitable, and mobile robots are required to work in a mixed human-machine environment (the above-mentioned AGVs require human-machine isolation), and there are safety requirements as well as efficiency requirements, then AMR can only be selected. Whether it is point-to-point transportation in a factory or a warehouse order picking scene, AMR is the mobile robot closest to human transportation. At the same time, AMR is easy to deploy, easy to adjust, and suitable for application scenarios where business logic often changes.
Choose AMR for a wide range of flexible logistics scenarios
If the business volume of the application scenario is large and the machine input is large, many logistics solutions may be available, but AMR has more advantages in most cases. Because of the large operating area, AMR deployment costs are lower. For applications with a large number of machines, AMR runs more efficiently and requires fewer machines. Although the unit price of AMR is slightly higher than that of AGV, the overall plan has less investment, short payback period and lower risk.
Nowadays, the traditional human handling mode is limited by the rise in labor costs and it is difficult to meet the current production logistics needs, and automation transformation is a major key for enterprises to enhance their core competitiveness. Whether it is a simple point-to-point transportation AGV or a freely shuttled AMR in a large scene, correctly recognize the difference between them and match it to your own scene, so that intelligent manufacturing can go further.



